04. BFS: Expansion Vector
BFS: Expansion Vector
Now that you have expanded the cells until you've reached the goal, you are asked to print the order in which each cell was expanded. For that, you’ll need to modify the search function and create a 2D expansion vector that is equal in size to the map. Each cell in the expansion vector will store the order at which it was expanded. Some of the cells were never expanded, and should show a value of -1 .
Hint
Take a look at the expansion list generated after running the code:
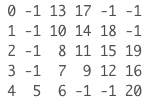
You can see that we started with the first cell and ended at the goal cell which was expanded after 20 iterations. All the obstacles and some cells were never expanded and thus are showing a value of -1 .
Now, go ahead and modify the search function to generate and print the expansion 2D vector.
Start Quiz: